The challenge is to make a robot that can score as many points as possible
in a robot version of the Tetris® game called Tetrastack. The robot will
locate, identify, and stack interlocking coloured shapes called tetracubes
within the Stacking Form a rectangular upright box. The mission was to
gather tetracubes from sources in the Construction Zone and place them into
the Stacking Form to complete as many interlocking rows as possible.
The teams were required to use computer vision to recognise the blocks and
figure out the best stacking position in minimum time and arrange the
tetracubes in the most optimum manner to score the maximum points.
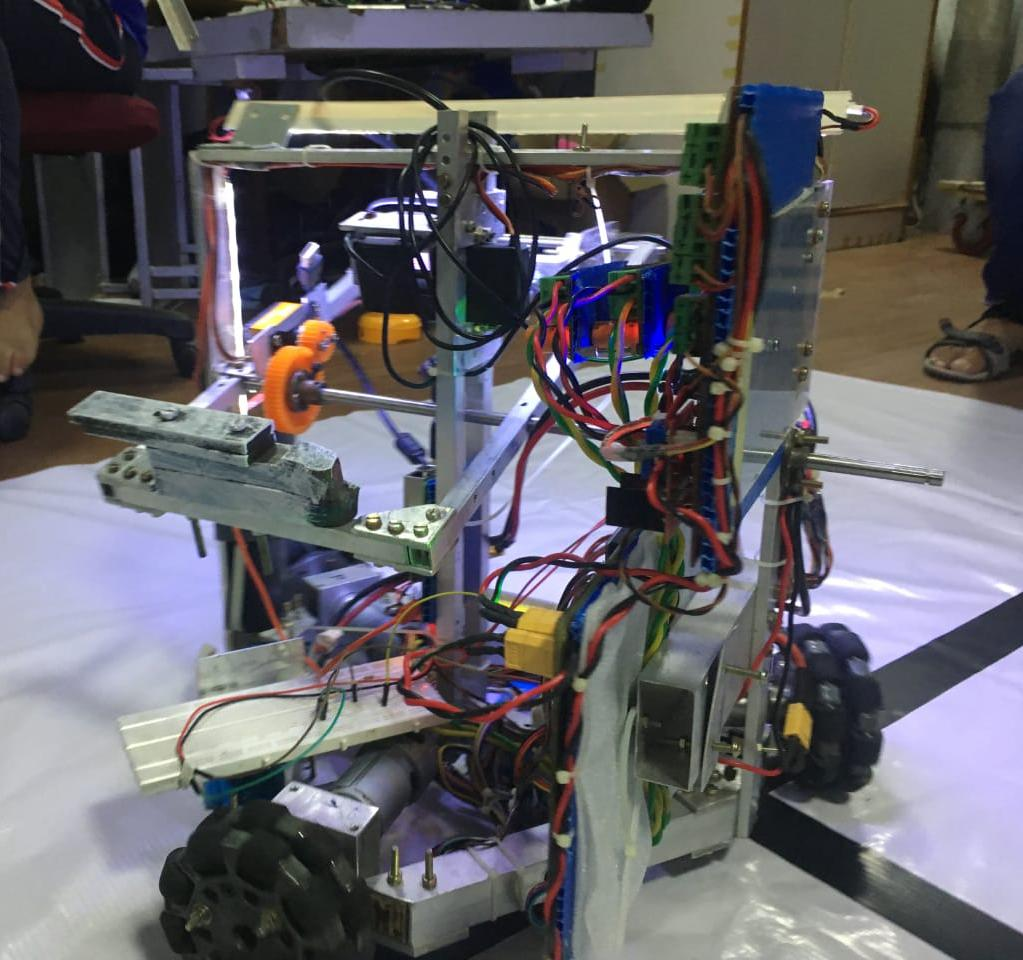
The bot made for this statement utilised a 3-wheel omnidirectional drive and
the Localization of the drive was done by using the values from the encoder
and feedback from the optical vision system.
The motion for picking and placing the tetracubes in the stacking form was
done in an angular fashion using gear assembly.
The objective was to develop an articulate frame possessing 2 degrees of
freedom, on which the end effector was mounted. The gripping mechanism
consisted of 2 fingers and the overall mechanism was actuated by a servo
motor.